

车型166
始自2016年款
带代码640 (高性能 LED)
车型166
始自2016年款
带代码641 (动态 LED 大灯 左侧行驶)车型166
始自2016年款
带代码642 (动态 LED 大灯 右侧行驶)车型292
带代码640 (高性能 LED)
车型292
带代码641 (动态 LED 大灯 左侧行驶)车型292
带代码642 (动态 LED 大灯 右侧行驶)
功能要求, 概述
• 无过电压或低电压
• 运输模式未启用
• "发动机运转" 或 "传动系统运转" 信号开启
• 近光灯开启
• "智能照明系统" 功能已通过仪表盘 (A1) 中 "设置" 菜单中的 "照明"
子菜单启用
有关运输模式工作状态的详细信息, 请参见单独的功能说明"能源管理, 功能".
在近光灯执行各功能时启用, 将在单独的文档 "行车灯促动, 功能"中进行说明.
弯道灯的附加功能要求
• 转向信号启用且车速 v < 40 公里/小时或检测到转向运动且车速 v < 70 公里/小时
• 弯道半径 r ≤ 500 米
共轨喷射系统柴油机 (CDI) 控制单元 (N3/9)(柴油发动机)或电控多端顺序燃料喷注/点火系统 (ME-SFI [ME]) 控制单元 (N3/10) (汽油发动机) 通过底盘控制器区域网络 1 (CAN E1),电子点火开关控制单元 (N73) 和底盘控制器区域网络 2 (CAN E2) 将"发动机运转" 或 "传动系统运转" 信号发送至左前灯组 (E1)上的左侧大灯控制单元 (E1n9) 或右前灯组 (E2)上的右侧大灯控制单元 (E2n9).通过仪表盘的操纵杆选择和开启或关闭 "智能照明系统"功能.仪表盘通过车内控制器区域网络 (CAN B),电子点火开关控制单元和底盘控制器区域网络 2 (CAN 2) 将相应状态发送至大灯控制单元.
智能照明系统, 概述
智能照明系统功能能够在不同的驾驶条件和天气条件下实现最佳道路照明.增加灯光输出并通过促动前灯组中各促动器开启额外灯光源实现上述目的.
智能照明系统功能包含以下子功能:
• 弯道灯的功能顺序
• 主动式转向照明灯, 功能顺序
• 主动式灯光分布的功能顺序 (装配动态左舵驾驶车辆 LED 大灯/代码 641 或动态右舵驾驶车辆 LED 大灯/代码 642)
弯道灯的功能顺序
弯道灯改善了弯道内侧的道路边缘照明.
弯道灯促动的直接输入因素是转向角传感器 (N49)记录的转向移动以及借助组合开关 (S4)的位置确定的转向信号功能,因为这些因素说明了驾驶员的方向要求.
弯道灯促动功能的促动特性受车速影响.在市区交通中,低速行驶时需要较低的开启阈值, 以确保提前启用弯道灯.
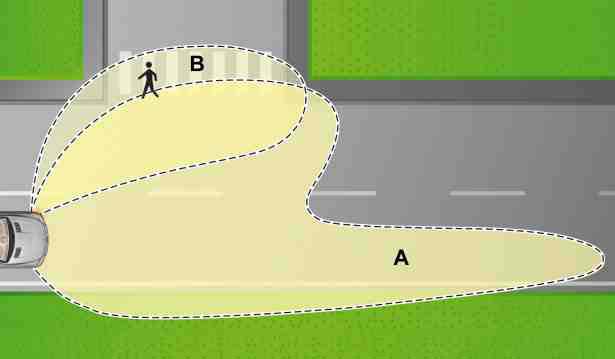
主动式弯道灯促动功能的灯光分布示意图
A 近光灯光锥
B 弯道照明雾灯光锥
转向柱管模块控制单元 (N80)
直接读取方向盘转角传感器的信号和组合开关的位置, 然后通过底盘控制器区域网络 1 (CAN 1),电子点火开关控制单元和底盘控制器区域网络 2 (CAN 2) 将转向角和组合开关位置等相关信息发送至左侧大灯控制单元. 根据车轮转速计算车速.为此,电控车辆稳定行驶系统控制单元 (N30/4) 通过底盘控制器区域网络 1 (CAN 1),电子点火开关控制单元和底盘控制器区域网络 2 (CAN 2) 将车轮转速信号发送至左侧大灯控制单元(E1e9).如有必要, 右侧大灯控制单元促动右侧弯道灯 (E2e9).
大灯控制单元以主从组合方式操作, 左侧大灯控制单元为主控制单元,可通过底盘控制器区域网络 2 (CAN 2) 同步右侧大灯控制单元.
同一时间仅促动一个弯道灯: 车辆前进时促动弯道内侧的弯道灯,倒车时促动弯道外侧的弯道灯.如果方向盘转角或转向信号请求快速变换,两只弯道照明雾灯都会短时间照明.相应的弯道灯以防眩形式开启和关闭.
车速在 40 公里/小时以下时, 与方向盘转角探测请求相比,转向信号功能的请求具有较高的优先级,这样可以确保转动方向盘和向相反方向转动时 (通过交通环岛的情况下)弯道内侧的道路边缘得到照明.倒档接合时,仅评估方向盘转角传感器的数据.
"倒档接合"状态定义如下:
• "R" 档由完全集成式变速箱控制单元 (Y3/8n4) 接合.然后,完全集成式变速箱控制单元通过传动系统控制器区域网络 (CAN C)将 "R 档已接合" 状态发送至电子点火开关控制单元.
电子点火开关控制单元利用收到的信息生成 "倒档已接合" 信号并通过底盘控制器区域网络 2 (CAN 2)将其发送至左侧大灯控制单元.
如果执行转向信号功能的同时通过检测到的方向盘运动请求弯道灯功能,促动行为就会更改.一旦检测到弯道半径 r ≤500 米,就会促动相应的弯道灯.
如果功能请求突然消失, 相应的弯道灯仍会保持开启状态约 t = 2秒, 并在 t = 2 秒内以防眩形式关闭.
主动式转向照明的附加功能要求
• 车辆向前行驶• 扩展雾灯功能已禁用
主动式转向照明灯, 功能顺序
• 车辆向前行驶 主动式转向照明能够在转弯时改善道路照明.为此,长光程的近光灯光锥朝弯道中心点水平转动.
前灯组中的近光灯模块安装在固定框架中, 以便其可移动.如此,长光程的近光灯光锥能够水平和垂直移动.当车辆转入弯道时,弯道内侧前灯组中的近光灯模块向上转动最多 α = 15°,弯道外侧的前灯组向上转动最多 α = 7.5°.
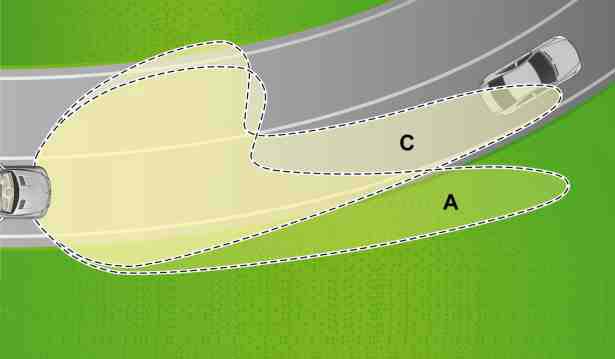
主动式弯道灯灯光分布的功能示意图
A 近光灯光锥
C 主动式弯道灯光锥
根据以下设定的变量执行主动式弯道灯功能:
• 转向角
• 车速
• 车辆的横摆特性 (车辆移动)
直接输入因素为转向角, 车速会影响该功能的控制响应(转向角转换为摆动角).
车速较低时, 需要较慢的转换过程, 这样灯光模式不会发生突变(如在城市交通中).以中等车速行驶时, 对于相对较小的转向角变化立即做出响应,以较高车速行驶时,响应再次衰减较大的幅度.以更低灵敏度和更高减震的范围 (约±6°转向角) 来弥补车辆笔直行驶时产生的自然偏摆.
主动式灯光分布的附加功能要求 (装配动态左舵驾驶车辆 LED 大灯/ 代码 641 或动态右舵驾驶车辆 LED大灯/代码 642)
车辆向前行驶转向柱管模块控制单元直接读取方向盘转角传感器的信号,然后通过底盘控制器区域网络 1 (CAN 1),电子点火开关控制单元和底盘控制器区域网络 2(CAN 2)将转向角相关信息发送至左侧大灯控制单元.根据车轮转速计算车速.为此,电控车辆稳定行驶系统控制单元通过底盘控制器区域网络 1 (CAN 1),电子点火开关控制单元和底盘控制器区域网络 2 (CAN 2)将车轮转速信号发送至左侧大灯控制单元.
车辆的横摆行为由集成在辅助防护装置控制单元 (N2/10)中的加速度传感器记录.辅助防护装置控制单元通过底盘控制器区域网络1 (CAN 1), 电控车辆稳定行驶系统控制单元, 底盘控制器区域网络 1(CAN 1), 电子点火开关控制单元和底盘控制器区域网络 2 (CAN 2)将相应的信息发送至驻车系统控制单元.
左侧大灯控制单元评估所有相关信息,并在必要时促动左侧主动式弯道灯促动马达 (E1m2).左侧大灯控制单元通过底盘控制器区域网络 2 (CAN 2)同步右侧大灯控制单元.然后,右侧大灯控制单元在必要时促动右侧主动式转向照明促动马达 (E2m2).左侧主动式弯道灯促动马达的当前位置由左侧主动式弯道灯位置传感器 (E1b1) 探测,而右侧主动式弯道灯促动马达的位置则由右侧主动式弯道灯位置传感器(E2b1)探测.主动式弯道灯位置传感器的信号由相应的大灯控制单元进行评估.
如果弯道照明促动发生故障, 可能的话,近光灯模块会转动至中央位置.如果主动式转向照明促动马达发生故障,左侧灯光分布促动马达 (E1m3) 或右侧灯光分布促动马达 (E2m3)就会被促动, 以遮挡住明暗边界的上升部分,从而减少对迎面而来的车辆造成眩光影响.
主动式灯光分布的功能顺序 (装配动态左舵驾驶车辆 LED 大灯/代码 641 或动态右舵驾驶车辆 LED 大灯/代码 642)
主动式灯光分布包含以下子功能:
• 高速公路照明的功能顺序
• 扩展雾灯的功能顺序
高速公路照明的附加功能要求
• 扩展雾灯功能已禁用 • 弯道半径 r ≥ 800 米
高速公路照明的功能顺序
• 扩展雾灯功能已禁用 高速公路照明功能可在不遮挡前面交通状况的情况下增大近光灯光程,从而改善道路照明效果.
垂直反射光锥并增大光线输出可实现上述功能.通常在高速公路上启用高速公路照明.
高速公路照明功能在雨天停用.雨量通过评估
"风挡玻璃雨刮器不在驻车档"
信号进行探测.如果风挡玻璃雨刮器在驻车档停留时间 t = 600 ms 以下,就评估为连续刮水.如果连续刮水功能启用时间 t > 2 分钟,就表示检测到雨水.信号采集及促动控制模组 (SAM) 控制单元 (N10)促动风挡玻璃雨刮器系统.
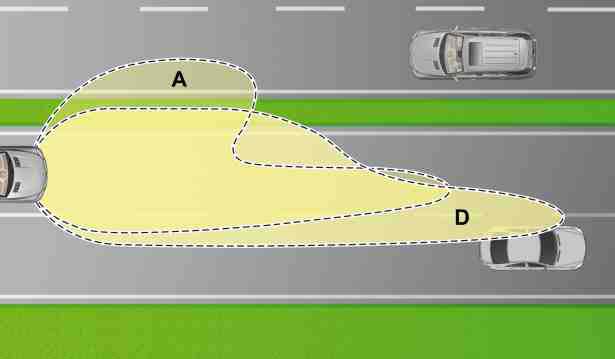
主动高速公路照明灯功能的灯光分布示意图
A 近光灯光锥
D 高速公路照明灯光锥
高速公路照明灯功能取决于以下控制因素:
• 转向角
• 车速
• 车辆的横摆特性 (车辆移动)
转向柱管模块控制单元直接读取方向盘转角传感器的信号和组合开关的位置, 然后通过底盘控制器区域网络 1 (CAN 1),电子点火开关控制单元和底盘控制器区域网络 2 (CAN 2)将转向角和组合开关位置等相关信息发送至左侧大灯控制单元.根据车轮转速计算车速.为此,电控车辆稳定行驶系统控制单元通过底盘控制器区域网络 1(CAN 1),电子点火开关控制单元和底盘控制器区域网络 2 (CAN 2)将车轮转速信号发送至左侧大灯控制单元.
车辆的横摆行为由集成在辅助防护装置控制单元中的加速度传感器记录.
辅助防护装置控制单元通过底盘控制器区域网络 1 (CAN 1),电控车辆稳定行驶系统控制单元, 底盘控制器区域网络 1 (CAN 1),电子点火开关控制单元和底盘控制器区域网络 2 (CAN 2)将相应的信息发送至驻车系统控制单元.左侧大灯控制单元通过底盘控制器区域网络 2 (CAN 2) 同步右侧大灯控制单元.
自车速 v = 90 公里/小时起, 如果弯道半径 r > 800 m 且行驶里程大于 s= 2.5 公里,近光灯 (长光程) 的灯光输出就会增加.
为此, 左侧大灯控制单元通过左侧大灯局域互联网 (LIN G1) 将"增大灯光输出" 请求发送至左前 LED 外车灯促动模块 (E1n7).左前 LED 外车灯促动模块以更大的功率促动左侧近光灯 (长光程) (E1e16).右侧大灯控制单元通过右侧大灯局域互联网(LIN G2) 将 "增大灯光输出" 请求发送至右前 LED 外车灯促动模块 (E2n7).
右前 LED 外车灯促动模块以更大的功率促动右侧近光灯 (长光程) (E2e16).
左侧大灯控制单元在车速 v = 110 公里/小时以上, 弯道半径 800 m以上且里程 s = 1 km 以上时促动左侧大灯光程调节促动马达(E1m1).升高左前灯组的大灯总成.近光灯的光程也随之增大.在 v = 130公里/小时时达到最大提升高度.如果车速减小到 v = 80 公里/小时以下,就会禁用 "高速公路照明" 功能.
扩展雾灯功能的附加功能请求
• 后雾灯促动激活
信号采集及促动控制模组 (SAM) 控制单元直接读取外车灯开关 (S1) 中后雾灯按钮 (S1s10) 的状态并通过车内控制器区域网络 (CAN B), 电子点火开关控制单元和底盘控制器区域网络 2(CAN 2) 将"后雾灯开启" 请求发送至左侧大灯控制单元.
展雾灯的功能顺序
扩展雾灯功能可增强道路边缘的照明效果并减小内部炫目效应.
在车速低于 70 公里/小时时,朝向道路内侧的前灯组中的近光灯模块会升高并向外转动.
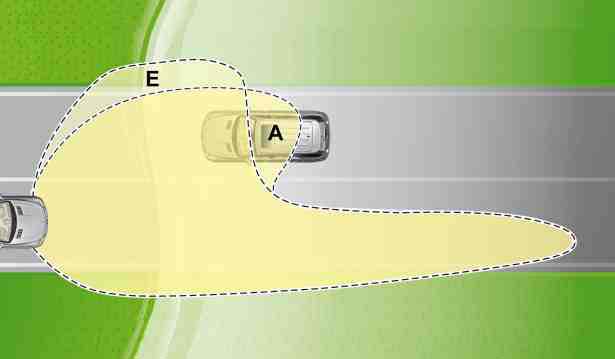
主动式扩展雾灯功能的灯光分布示意图
A 近光灯光锥
E 扩展雾灯功能光锥
根据车轮转速计算车速.为此,电控车辆稳定行驶系统控制单元通过底盘控制器区域网络 1 (CAN 1),电子点火开关控制单元和底盘控制器区域网络 2 (CAN 2)
将车轮转速信号发送至左侧大灯控制单元.
左侧大灯控制单元评估所有相关信息并促动左侧灯光分布促动马达和左侧主动式转向照明灯促动马达.左前灯组中的近光灯模块向外转动 α = 8°, 向上倾斜至右侧的明暗界限部分被遮挡.这既可以降低内部炫目影响,又可以改善路面一侧的照明.
左侧主动式转向照明灯促动马达的当前位置由左侧主动式转向照明灯灯位置传感器检测,而左侧灯光分布促动马达的位置则由左侧灯光分布位置传感器 (E1b2)检测.位置传感器的信号由左侧大灯控制单元评估.
如果扩展雾灯功能启用,
主动式弯道灯和转向灯功能就会停用.如果在 "扩展雾灯功能"
启用的同时请求远光灯功能, 大灯总成的位置就保持不变.
扩展雾灯功能在以下状况下停用:
• 灯组发生故障 (近光灯)
• 促动马达发生故障
测试和调节前灯组时, 确保扩展雾灯功能未启用.
2010 款奥迪 A8底盘系统技术培训
奔驰COMADE多媒体主机黑屏维修

